Artykuł pochodzi z GEOSPATIALWORLD
Przełożył Bartłomiej SZTUBA
We wrześniu 2020r na portalu internetowym Geospatial World ukazał się blog znanego amerykańskiego autora tekstów technicznych, redaktora konsultingowego Geospatial World Magazine, praktykującego geodety Gavina Schrocka, PLS. Chcielibyśmy przybliżyć Wam ten artykuł, który jest wynikiem bezstronnych testów naszego najnowszego odbiornika GNSS Leica GS18 I, przeprowadzonych przez autora poniższego artykułu.
O GEOSPARIALWORLD
Ze średnią ponad 135 000 odwiedzających miesięcznie, www.geospatialworld.net jest bez wątpienia numerem jeden w dziedzinie mediów geoprzestrzennych; i jest wiarygodnym źródłem informacji dla profesjonalistów w ponad 150 krajach. Witryna internetowa, która integruje elementy tekstowe, graficzne i wideo, jest interaktywnym portalem dla wszystkich zainteresowanych branżą geoprzestrzenną, umożliwiającym łączenie się za pośrednictwem innowacyjnych mediów, w tym wiadomości, filmów, blogów, studiów przypadków, artykułów, wywiadów, wykazów firm i wydarzeń.
Ponad 220 000 wyświetleń stron miesięcznie
Ponad 135 000 odwiedzających miesięcznie
Ponad 150 000 sesji miesięcznie

GAVIN SCHROCK
Gavin Schrock jest redaktorem konsultingowym Geospatial World Magazine, branżowego wydawnictwa poświęconego naukom z dziedziny geomatyki. Jest także praktykującym, licencjonowanym geodetą, autorem tekstów technicznych i administratorem sieci stacji referencyjnych GNSS. Pracował w miernictwie, kartografii i geodezji. Posiada doświadczenie w dziedzinie monitoringu, zarządzania danymi, radionawigacji i GIS poparte przez ponad trzy dekady pracy w instytucjach państwowych, firmach komercyjnych, obronności i instytucjach użyteczności publicznej. Publikował w tych dziedzinach i nauczał tych przedmiotów na konferencjach lokalnych, stanowych, krajowych i międzynarodowych.
Autor: Gavin Schrock - 11.09.2020
GNSS, IMU i obrazowanie
Rozwój odbiorników GNSS nadal przybiera formę integracji różnych sensorów. Leica Geosystems zintegrowała w swoim odbiorniku pomiarowym GS18 I funkcje pomiaru punktów na obrazach - i wykonała kawał dobrej roboty.
Szukałem bardziej technicznego sposobu, aby to powiedzieć, ale co tam: nowy GS18 I jest po prostu bardzo fajny. Otrzymałem jeden odbiornik na testy i wyniki były imponujące. Chociaż nie jest to pierwsza implementacja funkcji obrazowania w odbiorniku GNSS, to ta ścisła integracja wielokonstelacyjnego GNSS, pochyłomierza bez kalibracji i wizualnego pozycjonowania jest znacząca, ponieważ przepływ pracy jest bardzo dobrze dopracowany. Chociaż ani ja, ani niniejsza publikacja nie popieralibyśmy żadnych konkretnych produktów, impulsem do tych testów było podkreślenie znaczącego rozwoju technologii zintegrowanych sensorów. Poza tym jestem geodetą i nie mogę się doczekać próbowania nowych rzeczy.
Punkty na obrazach wyliczane są na podstawie wskazania na jednym lub więcej obrazach z grup zarejestrowanych automatycznie przez wbudowaną w odbiorniku kamerę, w terenie lub później w biurze.
Przejdę do sedna: testowałem go dość intensywnie w wielu scenariuszach i chociaż zgodnie ze specyfikacją jest on przeznaczony tylko na krótkie odległości (tzn. 2 m do 10 m ), to w moich testach konsekwentnie dawał błędy pozycji (bezwzględne) poniżej 30 mm. Względne dokładności oczywiście były jeszcze lepsze. Optymalnymi do pomiaru wydają się być punkty oddalone od odbiornika o 2 m do 8 m. I tak, sprawdziłem te punkty i błędy położenia przy pomocy tachimetru.
Pozwólcie mi teraz na małą dygresję. Na każdym etapie ewolucji tego i innych nowych instrumentów do gromadzenia danych w terenie, wyniki mogą wydawać się magiczne w porównaniu do sprzętu, którego używaliśmy w przeszłości. Na początku musimy być sceptyczni. Nawet jeśli osiągamy wspaniałe wyniki, które są imponujące, pozostają pytania, co się dzieje w tych magicznych „czarnych skrzynkach”. Instrumenty takie jak GS18 stanowią połączenie wielu innowacji w sensorach i rozwiązaniach. Potrzeba pewnej dozy wiary, aby zaakceptować wyniki, często sprzeczne z dziesięcioleciami doświadczeń z wcześniejszych prób zbliżania się do podobnych technologii i próbami ich praktycznego zastosowania. Zdobycie wiedzy na temat tego, w jaki sposób ten wielosensoryczny system osiąga końcowe rezultaty, powinno pomóc w zachowaniu zdrowego sceptycyzmu i może pomóc w opracowaniu dobrych praktyk terenowych, aby jak najlepiej go wykorzystać.

Testowany zestaw: Leica GS18 I i CS35 (Win 10) kontroler/tablet (można go również używać z kontrolerem CS20).
Po nitce do kłębka
Jak to jest możliwe? Cofnijmy się trochę i przyjrzyjmy się ewolucji pomysłu umieszczenia kamery na odbiorniku GNSS, aby w ten sposób gromadzić dane, mierzyć punkty. Pierwsze pytanie brzmi: dlaczego? Jednym z najbardziej oczywistych powodów, dla których do tego dążymy, jest pokonanie pięty achillesowej odbiorników GNSS, a mianowicie tego, że mogą one mieć trudności (lub nawet nie mogą w niektórych przypadkach) mierzyć punktów w miejscach z przesłonięciami horyzontu. Na przykład w gęstym zadrzewieniu lub pod zadaszeniem. Sam system GNSS z wieloma konstelacjami poprawił to do pewnego stopnia, na przykład w przypadku wydajności na terenach zadrzewionych. Również rozwiązania związane z pochyłomierzem mogą się dobrze sprawdzić (np. poprzez wychylanie tyczki w kierunku otwartego horyzontu). Starsze rozwiązania pomiarowe związane z ograniczeniem horyzontu mogą obejmować wykonywanie pomiarów referencyjnych na otwartej przestrzeni, a następnie wykonywanie domiarów taśmą lub wyciągnięcie tachimetru. Obecnie rozwiązania pozycjonowania wizualnego wykorzystują różne metody fotogrametryczne do pomiarów punktów. W tej implementacji punkty niedostępne mierzone są na automatycznie zebranych i zarejestrowanych grupach obrazów.
Istnieje już kilka wdrożeń kamer w odbiornikach GNSS i wiele z nich było próbowanych w przeszłości. Na przykład niektóre odbiorniki Javad mogą w tym celu używać swoich wbudowanych kamer, przy czym użytkownik może wybierać punkty z wielu obrazów, co działa dobrze w określonych sytuacjach. Podobnie Insight V1 firmy South Instruments posiada kamerę umieszczoną na tyczce pod odbiornikiem. Wypróbowałem kilka tego typu rozwiązań i stwierdziłem, że są one przydatne, chociaż nie zawsze dane są przetwarzane w terenie. Na przykład Insight V1 wysyła obrazy do chmury w celu przetworzenia, a niektóre inne wymagają przetwarzania w biurze, po fakcie. Jedną z najbardziej ambitnych implementacji obrazowania na tyczce był Trimble V10. Pod odbiornikiem umieszczono zestaw wielu kamer, aby uchwycić zestawy zdjęć panoramicznych, które można było przetwarzać w biurze, mierząc punkty lub tworząc chmury punktów.
Praca na każdym takim odbiorniku, których próbowałem do tej pory, dawała dostatecznie dobre wyniki jeśli chodzi o pomiary punktów niedostępnych, ale sam przepływy pracy był nieco uciążliwy. Na przykład były to czasochłonne czynności, takie jak konieczność trzymania tyczki nieruchomo lub używano starszych (opartych o magnetometry) funkcji pochyłomierza, aby uzyskać dobrą pozycję odniesienia GNSS. Trudno było utrzymać spójne dokładności. Odkryłem też, że większość z tych rozwiązań nigdy tak naprawdę nie przyjęła się w codziennym użytkowaniu tak bardzo, jak początkowo oczekiwano.
GS18 I integruje kilka najnowszych, kluczowych osiągnięć technologicznych, aby zapewnić prosty przepływ pracy, który nie będzie obciążał użytkownika zbyt wieloma krokami w celu uzyskania współrzędnych punktów niedostępnych - bezpośrednio w terenie. Plotki o tym rozwiązaniu krążyły już od jakiegoś czasu. Po oficjalnym przedstawieniu produktu zapytałem Bernharda Richtera, wiceprezesa ds. Geomatyki w Leica Geosystems (część Hexagon), o prace nad tym rozwiązaniem i czego się po nim spodziewać. Powiedział mi wtedy, że dążył i pracował nad ścisłą integracją sensorów, jak ta, przez prawie dekadę. I że poprzedni model, GS18T (pierwsza duża implementacja pochyłomierza bez kalibracji) był jedynie pierwszym krokiem na tej drodze. Rzeczywiście, pochyłomierz bez kalibracji ma kluczowe znaczenie dla działania tego systemu i jego prostej obsługi (omówię to bardziej szczegółowo później). Richter powiedział mi również, żebym przypomniał sobie wykłady z fotogrametrii. Pamiętając o podstawach fotogrametrii podczas obsługi urządzenia, nie zawiodę się.
Praca na obrazach
Na pierwsze testy zabrałem odbiornik na dach naszego budynku, gdzie zorganizowałem (z zachowaniem dystansu społecznego) poligon testowy. Mam tam zastabilizowane punkty kontrolne, wyznaczone dzięki wielogodzinnym obserwacjom GNSS z postprocessingiem danych, zapewniające maksymalną dokładność pozycji. Z tych punktów kontrolnych przy użyciu tachimetru, pomierzyłem punkty na niedużej konstrukcji na dachu, wybierając wyraźne punkty, które mogłem sfotografować za pomocą funkcji wizualnego pozycjonowania - dla porównania.

Obliczanie punktów na obrazach na kontrolerze po przechwyceniu grupy obrazów. Duży ekran na tym kontrolerze działała dobrze na tym etapie, ale GS18 I można również obsługiwać kontrolerem o rozmiarze bliższym tradycyjnej wielkości.
W pierwszej kolejności użyłem GS18 I jako zwykłego odbiornika RTK, łączącego się przez komórkę z pobliską stacją bazową (około kilometra). Miało to na celu określenie, jaka część składowa błędów dla pozycji bezwzględnych może pochodzić z rozwiązania RTK odbiornika. Zrobiłem również kilka krótkich sesji statycznych, aby mieć porównanie ze współrzędnymi z postprocessingu danych. Niektóre z punktów kontrolnych znajdowały się na otwartej przestrzeni, ale inne usytuowane były w miejscach o przesłoniętym horyzoncie i warunkach wielodrożności sygnałów GNSS.
Z testowanym odbiornikiem GNSS połączony był kontroler terenowy CS35, w zasadzie tablet Panasonic Toughpad. Całość obsługiwana jest przez oprogramowanie terenowe Leica Captivate na systemie Windows 10. Osobiście preferuję kontrolery terenowe z dużym ekranem, ale GS18 I może też działać z mniejszym kontrolerem CS20, czyli bardziej tradycyjnym kontrolerem ręcznym z pełną klawiaturą. Duży ekran był szczególnie przydatny przy pracy na obrazach.
Pracę rozpoczynamy od standardowych kroków z odbiornikiem RTK. Podłączamy GS18 I do kontrolera (przez WiFi). Następnie podłączamy kontroler do sieci. W tym przypadku testowany CS35 miał wbudowany modem komórkowy. Następnie łączymy się ze źródłem poprawek: radio lub IP do bazy lub połączenie z siecią czasu rzeczywistego przez NTRIP. Można skorzystać z usługi globalnych korekt PPP przez satelity pasma L, jak np. SmartLink (tym razem nie testowałem opcji PPP). Ja użyłem NTRIP do podłączenia pobliskiej bazy, która wysyła komunikaty w formacie RTCM3.2-MSM (5), aby móc korzystać ze wszystkich konstelacji GNSS. Po podłączeniu i sprawdzeniu poprawności uzyskiwanych wyników RTK na punktach kontrolnych, sprawdziłem niektóre wyniki pomiarów z pochyłomierzem.
GS18 T i GS18 I mają wskaźnik działania pochyłomierza zarówno na samej antenie, który świeci na zielono, jeśli IMU jest zainicjalizowane, a na czerwono, jeśli nie, oraz w oprogramowaniu kontrolera. Inicjalizacja jednostki IMU wymaga tylko niewielkiego ruchu odbiornika - wystarczy przechylić tyczkę o parę centymetrów, a wskaźnik zmieni kolor na zielony. Potem można już rozpocząć rejestrację grup obrazów. Wybieram obszar lub elementy, które chcę zarejestrować, takie jak np. przód konstrukcji dachu, o którym wspomniałem, i mentalnie planuję ścieżkę po której przejdę z odbiornikiem, aby utworzyć grupę obrazów. Uruchamiam funkcję przechwytywania obrazu jednym kliknięciem i idę przed siebie, trzymając kamerę skierowany w stronę obiektu. Nie ma nawet potrzeby zbytniego zastanawiania się, ponieważ można zarejestrować wiele grup obrazów i wybierać punkty z dowolnej ich kombinacji.
Kluczową i najlepszą, sprawdzoną metodą jest zgromadzenie podczas przemarszu wielu nakładających się na siebie obrazów. Urządzenie rejestruje obrazy co pół sekundy, przez maksymalnie 60 sekund na grupę. Należy poświęcić trochę czasu, aby upewnić się, że interesujące nas punkty są widoczne na jak największej liczbie obrazów. Przeszedłem więc kilka kroków, zanim znalazłem się prostopadle do początku konstrukcji i przeszedłem kilka kroków poza jaj drugi koniec. Po kilku eksperymentach odkryłem, że chodzenie po łuku wokół konstrukcji zapewnia najlepszą geometrię.
Patrząc na wyświetlane na żywo obrazy w trakcie przemarszu, możesz zorientować się, jak tworzona jest grupa obrazów i jak należy obracać tyczkę, gdy okrążasz interesujący cię element. Zauważyłem również, że ze względu na ograniczone pole widzenia kamery, szczególnie gdy znajdujemy się blisko mierzonej konstrukcji, pomocne jest lekkie przechylanie tyczki do przodu i do tyłu. W ten sposób mogłem zarejestrować obrazy niższych i wyższych sekcji konstrukcji. Rozpoczynasz robienie zdjęć, idziesz do 60 sekund, zatrzymujesz się i zapisujesz. Gdy jesteś w ruchu, jednostka IMU pozostaje zainicjalizowana (więcej o tym później). Zwykły ruch tyczki podczas chodzenia zapewnia inicjalizację IMU i działa to po prostu dobrze. Nie trzeba próbować trzymać tyczki w pozycji pionowej, ponieważ IMU kompensuje wychylenie tyczki w pełnym zakresie. Po prostu poruszaj się pewnym, stałym tempem, aby robić zdjęcia odpowiednio nachodzące na siebie.
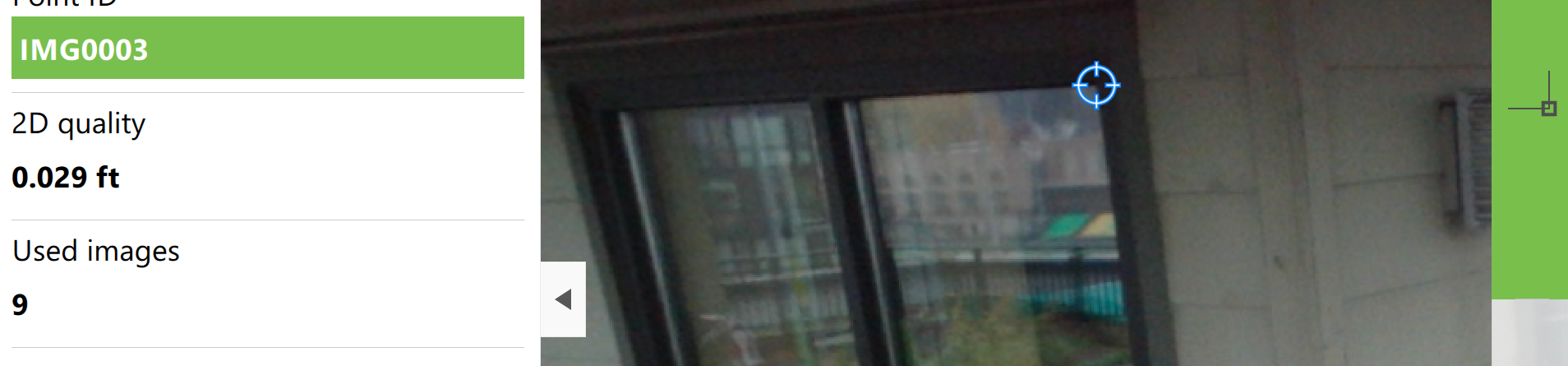
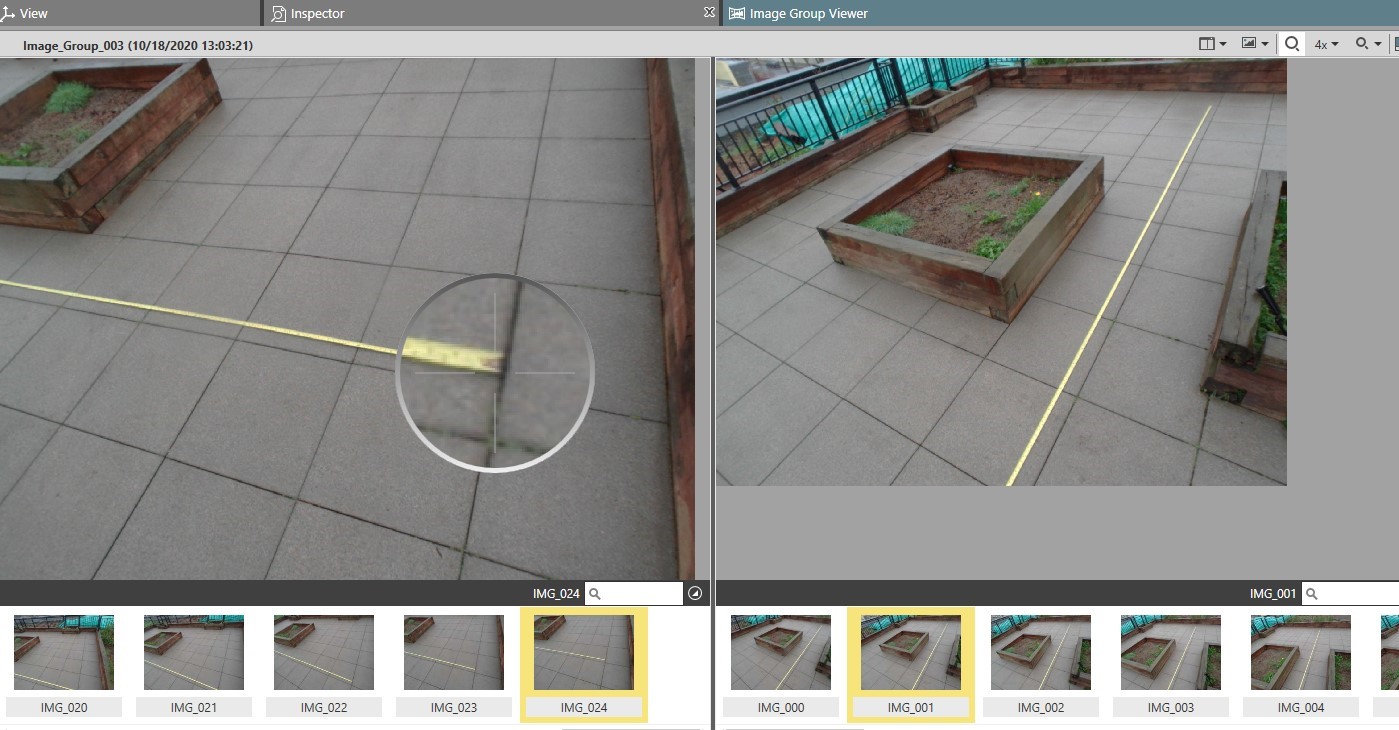
Gdy masz już jedną lub więcej zapisanych grup obrazów, możesz je otworzyć w Captivate i rozpocząć pomiar punktów na obrazach, nadając im dowolną numerację, kody i atrybuty jakie tylko chcesz. Punkty te są traktowane, jak wszystkie inne punkty pomiarowe. Obrazy w obrębie jednej grupy wyświetlane są jako rodzaj galerii w formie karuzeli – można je przewijać w tej samej kolejności, co ścieżka, którą przeszedłeś. Wybierasz jakiś punk na jednym obrazie i widzisz zgrubną precyzję. Na przykład może ona wynosić 40 mm. Masz możliwość wskazania tego samego punktu na kolejnych obrazach. W miarę jak to robisz, wyświetlana precyzja ulegnie poprawie, zwłaszcza jeśli wybierzesz obrazy korzystne geometrycznie. Możesz zobaczyć, że błąd wyznaczenia pozycji punktu spadnie o połowę lub nawet więcej. Naroża okien, krawędzie elementów konstrukcyjnych, krawędzie płyt, gwoździe lub wkręty, krawędzie listew odbojowych i pasów drogowych; to są przykłady elementów, które łatwo pomierzysz na obrazach używając funkcji automatycznego dopasowywania. Dokładność wyświetlana we właściwościach punktu mierzonego na obrazie na początku niekoniecznie jest taka sama jak ostateczna uzyskana absolutna dokładność, a ta była zaskakująco bliska w porównaniu z późniejszymi pomiarami z tachimetru. W każdym razie jest to dobre narzędzie, które pozwala z grubsza zorientować się, jak bardzo możesz poprawić precyzję punktu podczas dobierania go na kolejnych obrazach.
Na ekranie pomiaru punktów na obrazach dostępne jest narzędzie automatycznego snapowania do narożników, które w razie potrzeby można powiększać (kilkoma sposobami), aż do poziomu pojedynczych pikseli. Ale nie oczekuj, że poradzi sobie ono równie dobrze na długich dystansach. Automatyczne wybieranie punktów może być wyzwaniem, jeśli nie ma ostro zdefiniowanych lub kontrastowych elementów.
Punkty można również mierzyć na obrazach w podobny sposób w oprogramowaniu biurowym Leica Infinity, z obiektów wyeksportowanych z Captivate, a następnie zaimportowanych do Infinity. Lupa w Infinity była plusem.
Możesz wyeksportować pliki z robotami, które zawierają grupy obrazów z Captivate, a następnie zaimportować je do Infinity, oprogramowania biurowego Leica i kontynuować pomiary punktów na obrazach w podobny sposób. Praca w Infinity ma pewne zalety, takie jak użycie lupy, a wybieranie punktów w biurze jest nieco łatwiejsze niż za pomocą rysika i tabletu w terenie.
Możesz też przetwarzać grupy obrazów, pojedynczo lub scalone, w chmury punktów. Infinity ma narzędzia do fotogrametrii naziemnej i selekcji punktów, a także może przetwarzać obrazy z innych źródeł: foto-tachimetrów, MultiStation, UAV i ich kombinacji.
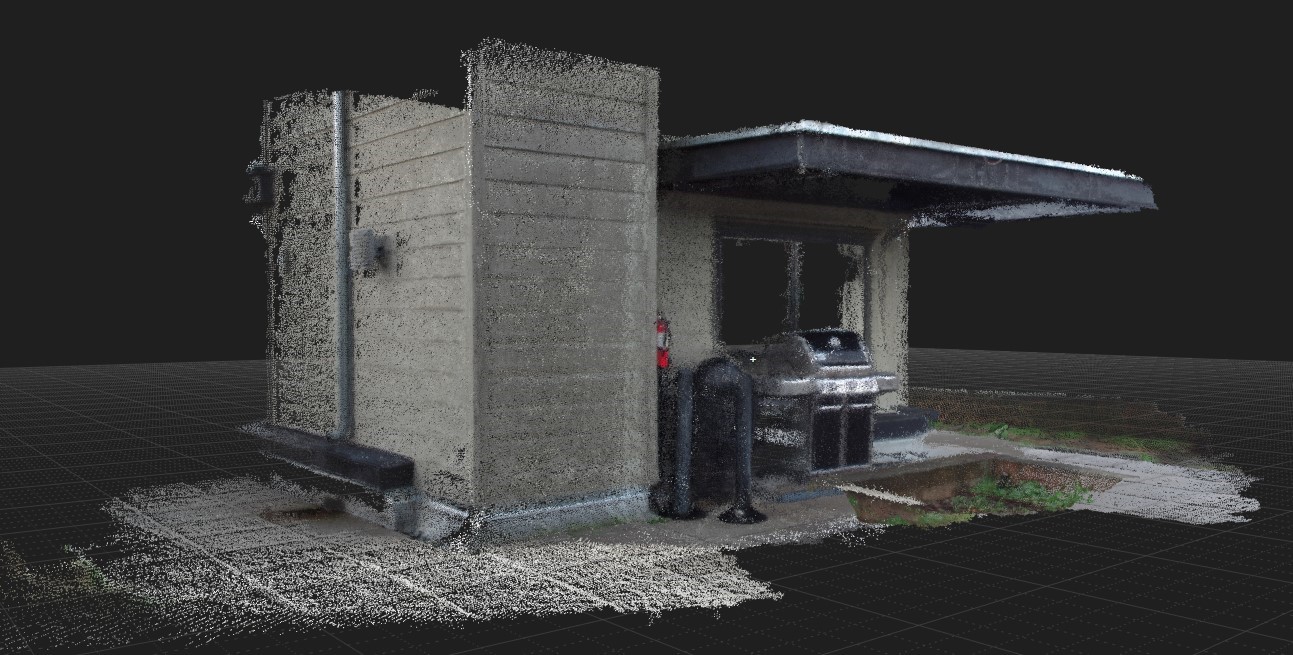
Chmura punktów ze scalonych grup obrazów przetworzonych w oprogramowaniu biurowym Infinity.
Komponent obrazujący
Kiedy patrzysz na obrazy, może wydawać się, że mają niską rozdzielczość. Być może będziesz musiał przyzwyczaić się do ograniczeń dotyczących tego, jak bardzo możesz powiększyć dany obraz i odpowiednio zaplanować pomiary. Aparat ma 1,2 MP. Dlaczego po prostu nie umieścili w urządzeniu kamery o znacznie wyższej rozdzielczości? Z tego, co udało mi się dowiedzieć, wynika to z tego, iż jest wiele kwestii inżynieryjnych i zależności, które sprawiłyby, że praca z kamerą o wyższej rozdzielczości byłaby niepraktyczna. Podczas rejestracji i przetwarzania obrazów w tle dzieje się tak wiele - musiały zostać powzięte pewne kompromisy. Poza tym niezbędne było zastosowanie migawki globalnej, która w porównaniu ze zwykłą przesłoną nie powoduje zniekształceń obrazów wykonywanych w ruchu. Wykonaj rejestrację kilku grup testowych i przyjrzyj się elementom na obrazach i po prostu poczuj zakres w jakim jesteś w stanie dokładnie wskazywać elementy. Położyłem na ziemi miarkę i chodziłem rejestrując grupy obrazów równolegle do konstrukcji w określonych odległościach. Potem popatrzyłem, jak dobrze potrafię wskazywać punkty na obrazach. W ten sposób określiłem najbardziej odpowiedni zakres: od 2 m do 8 m dla punktów, które chciałem pomierzyć. Udało mi się uzyskać kilka punktów na 15m, ale na większych odległościach robi się to już trudne.
Zaskakująco dobra wiadomość: to wszystko dobrze działa w deszczu. Lało prawie przez cały czas, kiedy miałem urządzenie na testach (taka jest jesień w Seattle), ale nie miało to na nic wpływu. Sytuacja z deszczem zmusiła mnie do zoptymalizowania mojego stylu pracy: najpierw rejestrowałem grupy obrazów, a następnie stojąc pod daszkiem budynku, mierzyłem pikiety na obrazach. Mogę więc zarejestrować dowolną liczbę grup obrazów, następnie udać się do samochodu i przed opuszczeniem budowy, wygodnie sprawdzić, jak dobrze te punkty „siedzą”. Podczas tego testu, w opisanym przeze mnie zakresie, większość punktów porównywanych z wcześniejszymi pomiarami z tachimetru miała błąd położenia mniejszy niż 30 mm. Jednak zdarzały się też takie, które miały błąd około 40 mm. Chociaż to raczej miało więcej wspólnego z tym, jak trudne było ich wybranie, ponieważ nie były wystarczająco duże, nie kontrastowe lub w inny sposób trudne do wskazania na wielu zdjęciach.
Inną rzeczą, o której należy pamiętać podczas rejestracji grup obrazów, jest to, że w tle zachodzi inny istotny proces, który nie jest widoczny dla użytkownika. Jest to kluczowy proces dla rejestracji obrazów, odbywa się on w locie i sprawia, że GS18 I jest wyjątkowy wśród dotychczasowych rozwiązań. Proces ten wykorzystuje kolejną innowację firmy Leica: VIS (wizualny system inercyjny), który został zaimplementowany na przykład w skanerze RTC360. Jest to sposób na stopniowe (za pomocą kamer) śledzenie wspólnych punktów obrazu podczas przemieszczania się instrumentu i pomaga w automatycznej rejestracji przechwyconych obrazów lub skanów. Nie wybierasz tych punktów i nie możesz ich zobaczyć - system robi to w tle, gdy idziesz rejestrując grupę obrazów. Rozpoczynając rejestrację grupy obrazów, instrument szuka dziesiątek dobrze zdefiniowanych wzorów pikseli na każdym obrazie i takich samych na kolejnych obrazach (to wszystko z częstotliwością 20 klatek na sekundę). W przypadku skanera RTC360 te przejściowe punkty wspólne wykorzystywane są do wspomagania rejestracji skanów w terenie. GS18 I wykorzystuje elementy rozwiązania w stylu VIS do wzajemnej rejestracji obrazów oraz wraz z systemem GNSS oraz IMU do orientowania ich w przestrzeni. W przeszłości istniały inne rozwiązania, które czegoś takiego nie robiły, przez co wymagały dodatkowych kroków rejestracji - często z kiepskimi rezultatami.
Pochyłomierz bez kalibracji
Aby system obrazowania działał tak, jak działa, uzależniony jest od tego samego systemu inercjalnego / GNSS, który zapewnia kompensację wychylenia. Przyjrzyjmy się nieco dokładniej komponentowi pochyłomierza. Dlaczego akcentuję zwrot „brak kalibracji” pochyłomierza? Dzieje się tak, ponieważ starsza generacja pochyłomierzy, które istnieją od prawie dekady, opierała się na orientacji magnetycznej. Komponent wychylenia jest stosunkowo łatwy do uchwycenia - czujniki przechyłu mogą być dość dokładne, ale jaki jest kierunek wychylenia? W tańszych rozwiązaniach pochyłomierzy często trzeba wykonywać żmudne procedury kalibracji (lub powinno się to robić częściej niż jest to robione), aby uwzględnić wpływy pola magnetycznego na sensor w miejscu pomiarów.
Problem z polem magnetycznym polega na tym, że może się ono znacząco zmieniać (chyba że pracujesz na małym obszarze) i powoduje ono zakłócenia magnetyczne. Chociaż pochyłomierze oparte na magnetometrach okazały się przydatne w niektórych zadaniach, wielu użytkowników uznało pracę z nimi za uciążliwą i obarczoną błędami. Dzięki ściśle zintegrowanemu GNSS i IMU uzyskujesz precyzyjną orientację bez wykonywania czynności kalibracji. W ogólnym sensie prawdą jest, że niezależnie działające moduły IMU podlegają dryfowaniu. Ale jednostka IMU zintegrowana z GNSS, jest stale, z wysoką częstotliwością aktualizowana. Taka integracje jest standardem w mobilnych, powietrznych i morskich systemach mapowania od wielu lat - wyzwaniem była miniaturyzacja odbiornika geodezyjnego.
Krótko po tym, jak ich pierwszy odbiornik GNSS z pochyłomierzem niewymagającym kalibracji - GS18T został w 2017 roku wprowadzony na rynek, wziąłem go na „jazdę próbną” i ostro testowałem. Znalazłem rozwiązanie trudne do przebicia. Próbowałem szybkich ruchów, kręcenia tyczką i przechylania do 45 stopni. W przypadku umiarkowanego wychylenia stwierdziłem, że różnica między pionem a nachyleniem jest nieistotna, a przy większym przechyleniu stwierdziłem, że różnica jest mniejsza niż 1 cm. Musiałem trzymać go bardzo nieruchomo, przez 10 sekund lub dłużej, aby zobaczyć czerwony wskaźnik (wyłączenie IMU), ale wystarczyło tylko lekko ruszyć tyczkę, aby powrócił kolor zielony (inicjalizacja IMU). Po dziesięcioleciach uczenia się, jak trzymać odbiornik tak nieruchomo, jak to tylko możliwe, do tej idei precyzji w ruchu trzeba się trochę przyzwyczaić.
Powtórzyłem te same testy pochyłomierza z nowym odbiornikiem, przyklejając małą cyfrową poziomicę do tyczki, aby zobaczyć, jak bardzo się przechylałem. Odkryłem szczególną zaletę takich nowych systemów w sposobie, w jaki usprawniają one tyczenie. Tradycyjna metoda polega na uchwyceniu punktu tyczonego, sprawdzaniu, o ile musisz się poruszyć, a następnie przesunięciu tyczki, ponownie sprawdzeniu, przesunięciu, sprawdzeniu itd., aż znajdziesz się w wyznaczonym miejscu tyczenia. Teraz, dzięki nowym odbiornikom z pochyłomierzami opartymi o IMU, możesz podejść w pobliże punktu tyczonego i po prostu przesuwać grot tyczki, aż trafi w punkt.

Osobny test możliwości obsługi wielu konstelacji i pochyłomierza odbiorników GS18T i GS18 I wykazał solidną wydajność w mieszanych warunkach i przy różnych stopniach wychylenia.
Można spotkać wiele wywodów na temat osiągania podobnych dokładności, lub nawet wyższych dokładności dzięki takim systemom pochyłomierzy w porównaniu do tradycyjnej libelki. Pokonanie poglądów o prymacie libelki tradycyjnej, czy elektronicznej może być skokiem wiary, ponieważ były one standardem od tak dawna. Ale kiedy testuję ten odbiornik i inne, takie jak Trimble R12i i Tersus Oscar, wyniki są trudne do zakwestionowania. W wielu nowych systemach wdrażana jest kompensacja wychylenia nie wymagająca kalibracji. Systemy te stale się poprawiają i znajdujemy co raz głębszy poziom komfortu w ich możliwościach, dostrzegamy też dramatyczne zmiany i korzyści w sposobie pracy.
Kolejna uwaga na temat GS18T i GS18 I: antena została specjalnie zaprojektowana w celu lepszego przechwytywania sygnałów satelitarnych przy przechyleniu. Na konferencji i wystawie HxGN 2018, był prezentowany odbiornik ze zdjętą obudową, aby pokazać specjalnie zaprojektowaną antenę, a Richter wyjaśniał jej cechy konstrukcyjne.
Wiele konstelacji
Kluczową, spodziewaną korzyścią płynącą z integracji wielu konstelacji satelitarnych teraz, gdy dwie najnowsze konstelacje osiągają pełną gotowość do pracy, jest możliwość pracy w wielu miejscach tam, gdzie było to trudne lub niepraktyczne z tylko jedną lub dwiema konstelacjami. Liczba widocznych satelitów wzrosła prawie czterokrotnie w porównaniu z początkami korzystania wyłącznie z GPS. GPS, Glonass, Galileo i Beidou; dwa ostatnie systemy osiągają pełną operacyjność z 3 (lub więcej sygnałami), a dwa pierwsze są modernizowane, otrzymując trzecie częstotliwości. To wszystko zmienia. Czy to również poprawia dokładność? Jest coraz więcej dowodów na to, że może tak być, zwłaszcza w przypadku modernizowanych 3 częstotliwości, różnice mogą być subtelne, ale sytuacja może się poprawić tylko wtedy, gdy odbiorniki poprawią sposoby łączenia i dopasowywania sygnałów satelitarnych.
Aby dostarczać dokładną pozycję zintegrowanej jednostce IMU, komponent GNSS jest stale aktualizowany z dużą częstotliwością. Rozwiązanie nie jest zamrożone na daną epokę korekty, które często są nadawane z częstotliwością 1 Hz. Nie ma potrzeby przeciążania, powiedzmy, radia bazowego wysokimi częstotliwościami, powiedzmy 10 Hz lub 20 Hz (chociaż jest to opcja). Transmitowane korekty nie pogarszają się znacznie między epokami. Wartości można przewidzieć lub, by tak rzec, ekstrapolować między epokami, przy czym precyzja jest stale zachowana. Zintegrowane rozwiązanie jest aktualizowane podczas ruchu, przez całą trajektorię ruchu odbiornika w przestrzeni. Jest to sprzeczne z długo utrzymywaną konwencjonalną filozofią, zrodzoną z dziesięcioleciami post-processingu, rozwiązań RTK i sieciowych NRTK, które to rozwiązania działały tylko w pionie i bez ruchu. Nie mówię, że musimy odrzucić wszystkie dobre praktyki, ale te zmiany będą wymagały od nas opracowania pewnych nowych praktyk.
Wydajność GNSS tego urządzenia, zwłaszcza w przypadku użycia wielu konstelacji, jest sama w sobie imponująca, podobnie jak w przypadku kilku innych nowych systemów dostępnych na rynku. Obejmuje to doskonałą wydajność w miejscach z przesłoniętym horyzontem i z efektem wielodrożności. Na przykład mam jedno ulubione miejsce „piekła wielodrożnego”, w którym testowałem wiele odbiorników przez lata - pod wieżą transmisyjną. GS18 T/I jest jednym z zaledwie czterech odbiorników, które tam testowane „złapały fixa”, dokładnie pomierzyły i wytyczyły punkt z oczekiwaną dokładnością. Nie sugeruję robienia z tego standardowej praktyki, ale daje to przekonująco dokładne wyniki.
Przypis dotyczący tego typu testów, które wykonuję: większość testów wykonuję samodzielnie, mając za pomoc tylko instrukcję, na której można się oprzeć. W przeszłości korzystałem z systemów Leica, takich jak systemy 1200 i Viva, ale nie korzystałem zbytnio z Captivate ani Infinity. Dzięki odrobinie ustnej pomocy dotyczącej pracy z obrazami udało mi się to dość szybko ogarnąć (co było świetne w te deszczowe dni). Powiedziałbym, że każdy może zacząć działać z tym nowym systemem i nowej funkcjonalności w ciągu jednego dnia. Jest to świadectwo nie tylko Leica, ale także innych dostawców, którzy rozszerzyli możliwości swoich systemów i oprogramowania, jednocześnie upraszczając przepływy pracy, ale zachowując na najwyższym poziomie dokładność i jej kontrolę. Prowadź je odpowiedzialnie, nie oczekuj, że będziesz tylko klikał guziki. Nadal musisz być bardzo rozważny w swoich praktykach terenowych i biurowych, aby jak najlepiej wykorzystać te magiczne pudełka.
Przyszłość integracji czujników
Kto może powiedzieć, co jeszcze przed nami w temacie podobnych odbiorników i innych? Czy można do nich dodać lasery i skanowanie w pewnym zakresie, aby ulepszyć rozwiązanie i umożliwić przechwytywanie jeszcze większej ilości danych? Czy następne będzie automatyczne rozpoznawanie elementów charakterystycznych za pomocą sztucznej inteligencji? Pomijając spekulacje na temat przyszłości, jeśli o mnie chodzi, integracja GNSS, IMU i kamer w odbiorniku jest teraz możliwa i jest doskonałym przykładem tego, jak przynajmniej część tej przyszłości dzieje się już teraz.
Kilka aktualizacji
Odkąd opublikowano ten blog, miałem trochę więcej czasu na przyjrzenie się danym. Wymieniłem również e-maile z Bernhardem Richterem, wiceprezesem ds. Geomatyki w Leica Geosystems (część firmy Hexagon) na temat kilku nowych kwestii technicznych i otrzymałem kilka wyjaśnień:
- Wybór punktów na wielu obrazach. Istnieje algorytm automatycznego dopasowywania, dzięki któremu (zwłaszcza gdy jest włączone snapowanie) pasujące obiekty (lub fragmenty / wzory pikseli) są automatycznie wyszukiwane na innych obrazach. Tak więc przepływ pracy dla obliczeń punktów na obrazach może działać przy wybraniu tylko jednego punktu na jednym obrazie. Podczas moich testów często wybierałem więcej niż jeden ręcznie, aby zobaczyć stopniowo zwiększającą się dokładność.
- Szybkość rejestracji grup obrazów. Zalecałem, żeby iść powoli. Nie jest to konieczne, ponieważ zespół programistów testował rozwiązanie przy prędkościach do 30 km/h. Możesz więc zamontować tyczkę na wsporniku w pojeździe badawczym i rejestrować dane podczas jazdy. Zalecałem powolne i rozważne przechwytywanie obrazów, aby upewnić się, że obrazy będą się dobrze pokrywać i aby pomóc nabrać praktyki w całym przepływie pracy. Ale gdy już przyzwyczaisz się do przepływu i wypróbujesz go z różnymi prędkościami, możesz określić najlepsze praktyki dla różnych potrzeb. Chciałem to wypróbować na pojeździe terenowym, ale tym razem mi się to nie udało.
- Chociaż podkreślałem absolutną dokładność punktów mierzonych podczas tych testów, znalazłem więcej czasu na przyjrzenie się względnym dokładnościom. Porównując punkty pomierzone na konstrukcji z tymi, które pomierzyłem za pomocą tachimetru, to punkty te pasują do około 3 mm, z wartościami odstającymi tylko w punktach, które były trudne do zlokalizowania. Żegnaj taśmo miernicza.
- Migawka aparatu. W tej dziedzinie jest duży postęp, więc może być możliwe włączenie kamer o wyższej rozdzielczości do takich rozwiązań. Richter przesłał mi e-mailem następujące wyjaśnienie: „Istnieją technologie, dzięki którym śledzenie elementów charakterystycznych będzie w przyszłości możliwe również w przypadku migawek szczelinowych. Zasada jest taka, że linie migawki (z odpowiednim czasem i pozycją) danego obrazu są odczytywane linia po linii, sam obraz jest rozpuszczany w liniach i wszystko jest obsługiwane matematycznie”. Wyobrażam sobie, że podczas tego konkretnego cyklu rozwojowego takie technologie processingu nie były dostępne (w tym czasie). Pewnie możemy się spodziewać, że może nie minąć zbyt wiele lat, zanim w takich zintegrowanych systemach zobaczymy kamery o rozdzielczości 5 MP, a nawet 10 MP.
Komentarze
Komentarze: 0
Zaloguj się, aby dodać komentarz.